性能更佳的义足SoftFoot Pro可复制真足的骨骼结构
 站长云网
站长云网想象一下,如果你的一只脚(或双脚)无法适应不平的行走路面,或者无法灵活地向前迈出每一步。这就是大多数义足使用者的感受,不过一种实验性的新型义足可以改变这种状况。
相比之下,人类的足部可以在很大程度上弯曲和伸展,使我们在不平或倾斜的地面上保持直立,并在行走时帮助我们的双腿向前移动。SoftFootPro的设计旨在为假肢提供同样的功能。
该原型设备由意大利技术研究所的曼努埃尔-卡塔拉诺(ManuelG.Catalano)及其同事创造,完全没有动力,重量仅为450克(1磅)。它可以承受佩戴者高达100千克(220磅)的负荷。
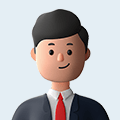
从照片中可以看到,SoftFootPro包含五条由高强度塑料片段连接而成的平行链。每条链的前段复制趾骨,后段复制跖骨(从每个脚趾的根部一直延伸到脚跟)。
弹性连接器用于连接每段链条。每条链条上都有一根内部钢缆,固定在钛合金脚跟上。
五根链条的上方是一个钛制的足弓装置。它的一端与趾骨基部相连,另一端与脚跟相连。这两个连接点可使趾骨和脚跟相对于足弓转动。这种装置的功能与人类足部的足底筋膜相同,后者是连接跟骨和脚趾根部的一条组织带。
就像足底筋膜对脚部的作用一样,足弓机制使SoftFootPro在每一步结束时脚趾弯曲,从而储存能量,然后在脚抬离地面向前迈出下一步时释放能量。据报道,当假肢重新落地时,其灵活的设计可以吸收10%到50%的冲击能量。
此外,在爬坡时,SoftFootPro还能让脚趾相对于脚的其他部分弯曲,使使用者保持直立,而且它还能适应不平的地形,防止使用者翻倒。该装置还能让用户更轻松地完成跪姿或蹲姿等动作,此外,由于它不会受到水的不利影响,因此可用于各种户外活动。
在汉诺威医学院和维也纳医科大学进行的临床试验中,截肢者志愿者已经对SoftFootPro进行了测试。此外,苏黎世联邦理工学院的Anymal四足机器人和东京大学的HRP-4人形机器人也对该技术进行了测试。
您可以在下面的视频中看到SoftFootPro复制人脚的动作。
踩一下[0]
顶一下[0]